Architecture v1 — MVP
This is the architecture for the first shippable version of Jan Agent Framework. It covers the core trait system, runtime orchestrator, memory/policy plugins, and CLI integration — everything needed to run jan agent chat through the framework with pluggable components.
Items marked as future in the complete architecture (v2) — hooks, I/O type erasure, turn engine, builder pattern, benchmark harness — are excluded here.
Component architecture
The system is organized into four layers — consumer, orchestration, core, and execution:
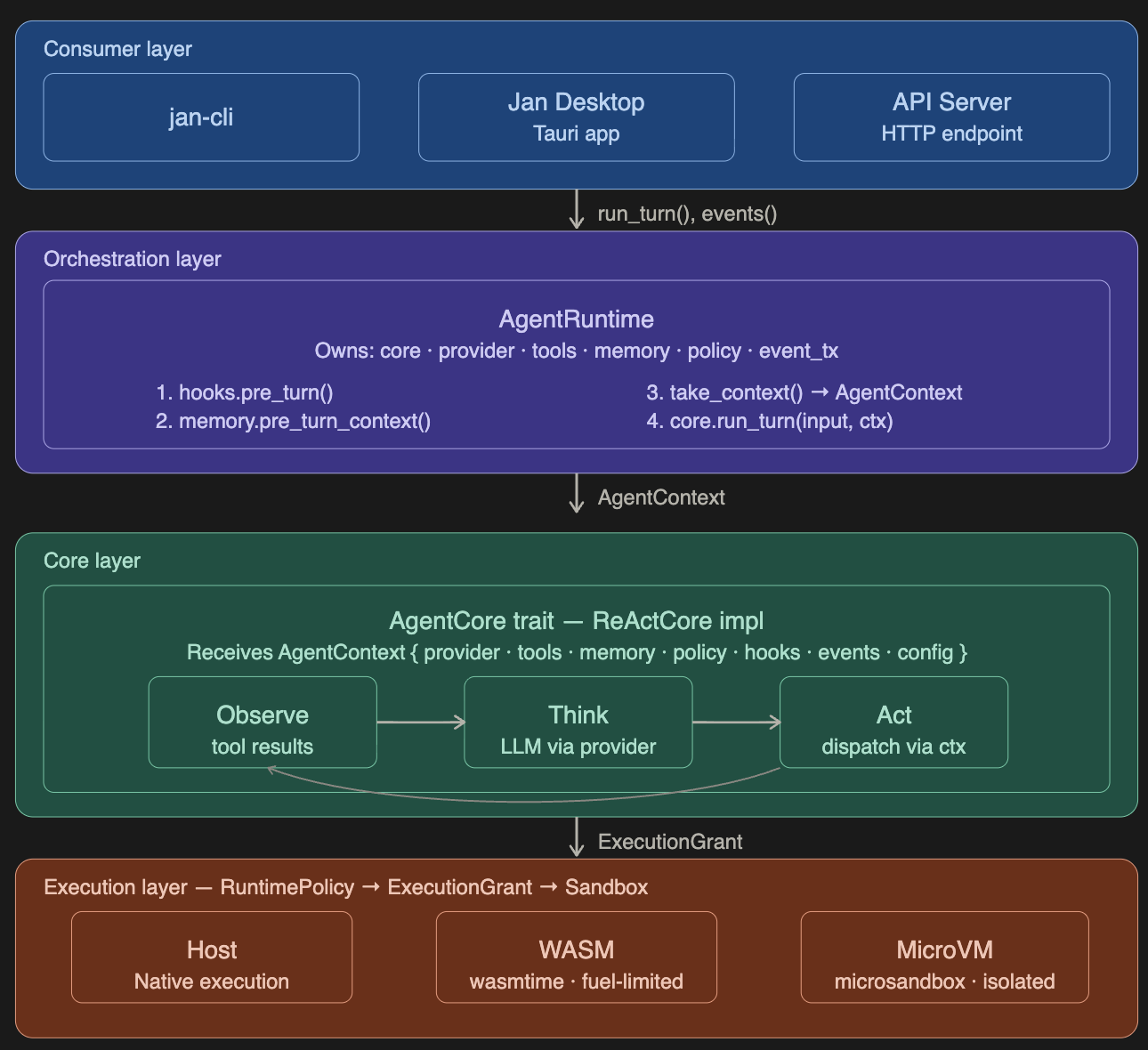
The agent core never makes direct HTTP calls. All LLM inference goes through ctx.provider.chat_completion() and all tool execution goes through ctx.tools.dispatch().
Component interaction
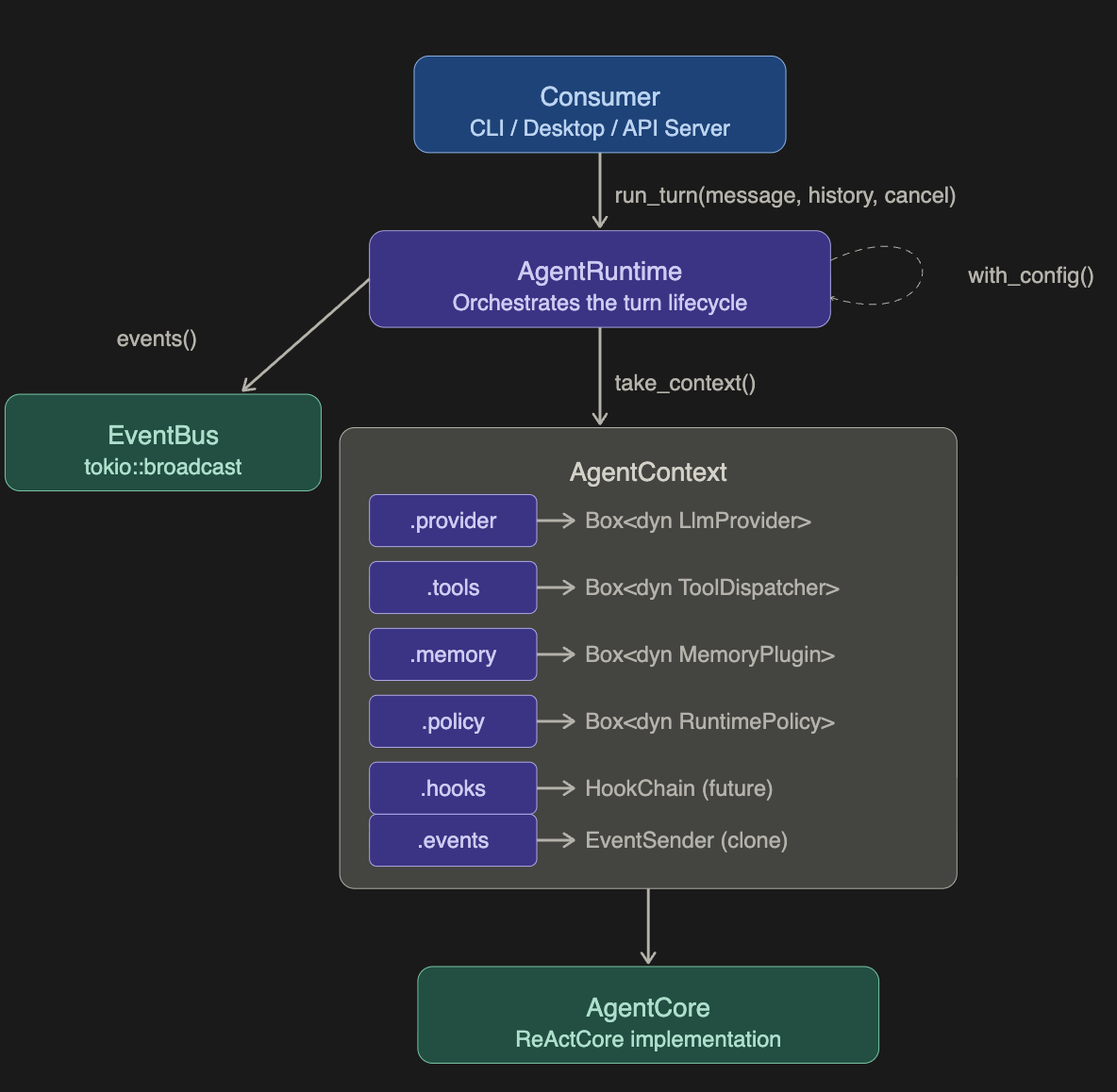
The AgentRuntime sits at the center. Consumers call run_turn(), which builds an AgentContext containing all real components and passes it to the core. Events flow out via a broadcast channel.
Trait hierarchy
These are the contract interfaces that define the framework's extension points:
AgentCore LlmProvider├── core_type() -> &str ├── name() -> &str├── run_turn(input, ctx) └── chat_completion(messages, tools, config)├── init(ctx) -> Result<LlmResponse, ProviderError>├── shutdown(ctx)└── built_in_tools() -> Vec<ToolMeta>ToolDispatcher MemoryPlugin├── dispatch(tool_id, args) ├── read(query) -> Vec<MemoryEntry>│ -> Result<DispatchResult> ├── write(key, content)└── tool_schemas() -> Vec<ToolMeta>├── forget(key) ├── pre_turn_context(msg, history)RuntimePolicy └── post_turn_observe(msg, response, history)├── check_permission(tool, args)│ -> Result<ExecutionGrant> SensorPlugin└── name() -> &str ├── latest_frame() -> Option<SensorFrame> ├── frame_count() -> u64 └── is_active() -> bool
AgentRuntime — the orchestrator
The runtime owns all components as trait objects and manages the agent lifecycle:
pub struct AgentRuntime { core: Box<dyn AgentCore>, provider: Box<dyn LlmProvider>, tools: Box<dyn ToolDispatcher>, memory: Box<dyn MemoryPlugin>, policy: Box<dyn RuntimePolicy>, config: FrameworkConfig, event_tx: EventSender,}
During a turn, the runtime temporarily moves real components into an AgentContext using std::mem::replace with noop placeholders, gives the core exclusive ownership, then restores them after the turn completes.
impl AgentRuntime { pub fn new(core, provider, tools, memory, policy) -> Self; pub fn with_config(self, config: FrameworkConfig) -> Self; pub async fn init(&mut self) -> Result<()>; pub async fn run_turn(&mut self, message, history, cancel) -> Result<TurnOutput>; pub fn events(&self) -> EventReceiver; pub async fn shutdown(&mut self) -> Result<()>;}
Data flow — one turn end to end
User input (text) │ ▼AgentRuntime::run_turn(message, history, cancel) │ ├── memory.pre_turn_context(message, history) │ → returns context entries to inject │ ├── take_context() │ → swaps real components into AgentContext │ ├── core.run_turn(TurnInput, AgentContext) │ │ │ │ ┌── REACT LOOP (may iterate many steps) ──────────────┐ │ │ │ │ │ │ │ 1. Build messages (system + history + user + vision) │ │ │ │ 2. Check cancellation │ │ │ │ 3. Check token budget → compact if needed │ │ │ │ 4. provider.chat_completion(messages, tools, config) │ │ │ │ ├── on success → LlmResponse │ │ │ │ ├── on ContextLength → compact and retry │ │ │ │ ├── on RateLimited → exponential backoff │ │ │ │ └── on AuthError → fatal │ │ │ │ 5. If final text (no tool calls) → return │ │ │ │ 6. If empty + no tools → nudge model, continue │ │ │ │ 7. For each tool call: │ │ │ │ a. ctx.tools.dispatch(name, args) │ │ │ │ b. Compress result, add to messages │ │ │ │ c. Emit AgentEvent::ToolResult │ │ │ │ 8. If vision → inject latest frame │ │ │ │ 9. Loop back to step 2 │ │ │ └──────────────────────────────────────────────────────┘ │ │ │ └── returns TurnOutput { response, tokens_used, steps, │ finish_reason, history } │ ├── restore_context() │ ├── memory.post_turn_observe(message, response, history) │ └── returns TurnOutput to consumer
Event system
The core emits events through a tokio::broadcast channel:
ReActCore (inside run_turn) │ │ ctx.events.send(AgentEvent::Thinking { step }) │ ctx.events.send(AgentEvent::ToolCall { step, tool_id, args }) │ ctx.events.send(AgentEvent::ToolResult { ... }) │ ctx.events.send(AgentEvent::Retrying { step, attempt, delay_ms }) │ ctx.events.send(AgentEvent::ContextCompacted { turns_removed }) │ ctx.events.send(AgentEvent::TokenBudget { used, total }) │ ▼EventSender (tokio::broadcast) │ ├──▶ Direct subscriber (Jan Desktop, API server) │ └──▶ spawn_event_bridge() → mpsc channel (jan-cli TUI)
Crate layout
crates/├── jan-framework/ ← Traits + types (the contract crate)│ └── src/│ ├── agent_core.rs AgentCore trait, AgentContext, TurnInput/Output│ ├── provider.rs LlmProvider trait, CompletionConfig, ProviderError│ ├── tool.rs ToolDispatcher trait│ ├── memory.rs MemoryPlugin + NullMemory, WorkingMemory│ ├── policy.rs RuntimePolicy + HostPolicy, StandardPolicy│ ├── sensor.rs SensorPlugin trait│ ├── events.rs AgentEvent enum, EventSender/Receiver│ ├── types.rs ChatMessage, ToolMeta, FrameworkConfig, LlmResponse│ ├── registry.rs PluginRegistry│ └── runtime.rs AgentRuntime (orchestrator)│├── jan-agent-core/ ← Agent implementations│ └── src/│ ├── react_core.rs ReActCore (standalone AgentCore impl)│ ├── openai_provider.rs OpenAiProvider (LlmProvider impl)│ ├── helpers.rs Context compaction, system prompts│ ├── dispatcher.rs Dispatcher (WASM/host/microVM routing)│ └── vision.rs VisionProvider + captures│├── jan-cli/ ← CLI binary (reference consumer)│ └── src/│ ├── main.rs CLI entry, TUI loop, one-shot mode│ ├── runtime_builder.rs build_runtime() + spawn_event_bridge()│ └── agent_tui.rs Ratatui TUI state and rendering│├── jan-agent-sandbox/ ← WASM execution engine (wasmtime)├── jan-data/ ← Model discovery, thread storage├── jan-llamacpp/ ← LlamaCPP process management└── jan-utils/ ← Shared utilities
Security model
User input │ ▼LLM inference (via ctx.provider) │ ▼Tool call requested by LLM │ ▼RuntimePolicy::check_permission() │ ├── Denied → error returned to LLM, turn continues ├── Granted(Host) → native execution, full access ├── Granted(Wasm) → wasmtime sandbox, fuel-limited ├── Granted(MicroVm) → microsandbox, network-isolated └── Granted(Remote) → forwarded to remote endpoint │ ▼Tool execution (in granted sandbox)
| Policy | Behavior |
|---|---|
| HostPolicy | All tools run natively on host (development) |
| StandardPolicy | WASM default, microVM for code.exec, host for robot.* |
| ProfilePolicy | Configurable per-tool overrides with deny-list |
Key design decisions
| Decision | Rationale |
|---|---|
| Trait objects over generics | AgentRuntime stores Box<dyn Trait>. Consumers never deal with AgentRuntime<C, P, T, M, Pol>. Dynamic dispatch cost is negligible vs LLM latency. |
| Take/restore over shared references | std::mem::replace moves real components into AgentContext. No Arc<Mutex<>> in the hot loop. |
| Event bridge for TUI | Framework uses tokio::broadcast; TUI expects mpsc. spawn_event_bridge() converts via JSON serde. Temporary bridge. |
| Two ChatMessage types | Legacy agent.rs has its own type. ReActCore uses framework type exclusively. Legacy type persists for backward compat only. |
What v1 does NOT include
These are designed but deferred to Architecture v2:
| Capability | Why deferred |
|---|---|
| Lifecycle hooks (HookChain) | Designed in doc 08; AgentContext has no .hooks field yet |
| I/O type erasure (AgentInput/Output) | Designed in doc 09; AgentCore uses fixed TurnInput/TurnOutput |
| Turn engine extraction | Shared single-turn runner for all cores (doc 12) |
| Builder pattern | AgentRuntimeBuilder with fluent API (doc 15) |
| Benchmark harness | Criterion benchmarks with mock LLM (doc 16) |
| Structured error strategy | Layered error handling by severity (doc 17) |